// projects / #1
RSF Grants
Active
Modeling and prototyping of technological processes of video analytics in the robotic maintenance of industrial aquaculture
// properties
- Period
- 2020 — present
- Project lead
- Ronzhin A.L
- Funding
- Russian Science Foundation
- Grant No.
- FFZF-2025-0012
// description
The purpose of the work is to increase the degree of autonomy and trouble–free operation of groups of agricultural UAVs.
Research methods include the theory of multi–agent and self-organizing systems, artificial intelligence technologies, technical vision, and others.
The results obtained. In 2025, conceptual and structural-functional models were developed describing the functioning of a group of agricultural UAVs and an operator in open spaces of agricultural land. A description of scenarios for the implementation of targeted agricultural tasks by the operator using a group of UAVs has been created. The design and creation of prototypes of four prototypes of agricultural UAVs with specialized attachments for the introduction of liquid substances, aeromonitoring and the implementation of an intuitive human-machine interface between the operator and the UAV group was carried out.
The planned quantitative indicators of the scope of the work have been completed, including the publication of more than 12 articles in Russian and international journals indexed by Web of Science, Scopus, RSCI, RSCI.
The scope of application. UAVs in the field of agriculture, ecology, logistics.
The importance of the work. Improving the accuracy, productivity and environmental safety of agricultural work, as well as reducing the cognitive burden on the operator and accelerating the implementation of swarm robotics solutions in the agricultural sector.
Further scientific research on the topic will be continued within the framework of the Program of Fundamental Scientific Research in the Russian Federation for the long-term period (2021-2030).
Research methods include the theory of multi–agent and self-organizing systems, artificial intelligence technologies, technical vision, and others.
The results obtained. In 2025, conceptual and structural-functional models were developed describing the functioning of a group of agricultural UAVs and an operator in open spaces of agricultural land. A description of scenarios for the implementation of targeted agricultural tasks by the operator using a group of UAVs has been created. The design and creation of prototypes of four prototypes of agricultural UAVs with specialized attachments for the introduction of liquid substances, aeromonitoring and the implementation of an intuitive human-machine interface between the operator and the UAV group was carried out.
The planned quantitative indicators of the scope of the work have been completed, including the publication of more than 12 articles in Russian and international journals indexed by Web of Science, Scopus, RSCI, RSCI.
The scope of application. UAVs in the field of agriculture, ecology, logistics.
The importance of the work. Improving the accuracy, productivity and environmental safety of agricultural work, as well as reducing the cognitive burden on the operator and accelerating the implementation of swarm robotics solutions in the agricultural sector.
Further scientific research on the topic will be continued within the framework of the Program of Fundamental Scientific Research in the Russian Federation for the long-term period (2021-2030).
// review — work done
The research team created a set of requirements for UAVs as part of a group, attachments, sensor system and features of human-machine interfaces for the implementation of target tasks, and also proposed a description of scenarios for the implementation of target agricultural tasks by the operator using a group of UAVs.
In the course of completing the research tasks, conceptual and structural-functional models of intuitive human-machine interfaces and control of the seamless operation of a group of agricultural UAVs in open spaces were developed, taking into account the specifics of the target tasks of applying liquid substances and collecting data on plants during aeromonitoring.
One of the key barriers to the widespread introduction of groups of UAVs in agriculture is the lack of specialized ground infrastructure to ensure their autonomous maintenance, which can significantly increase the efficiency of a single operator. The task of servicing unmanned aerial vehicles on a robotic ground platform has been decomposed, taking into account the safety issues of landing the UAV and moving it inside the platform on an assembly line, using several types of autonomous positioning that ensure reliable navigation in the absence of GPS facilities. The layout of a ground-based automated service platform is proposed, characterized by the presence of a four-section conveyor line that compactly folds in transport condition, ensuring the removal of the seat to a safe distance and simultaneous maintenance of up to three UAVs, including battery replacement, refueling of the working fluid and transportation to the launch pad. The originality of the proposed model of an autonomous robotic maintenance platform for conveyor-type UAVs lies in a set of facilities that provide a platform for autonomous landing, a robotic device for replacing the battery and filling the liquid into the tank. These qualities make the proposed platform a promising basis for creating a fully autonomous operating cycle for a group of UAVs for agricultural needs.
Special attention is paid to the task of technical inspection: a method has been developed for determining the angle of inclination of supports based on images from UAVs, combining camera parameters, GNSS data and machine learning algorithms. High detection accuracy has been achieved (mAP50 = 0.71, F1-score = 0.88), and calculated tilt angles (from 0.6° to 24.5°) make it possible to objectively assess the state of the infrastructure, reducing dependence on the human factor for marking obstacles on the ground and reducing the time spent on preparing flight missions for the introduction of substances.
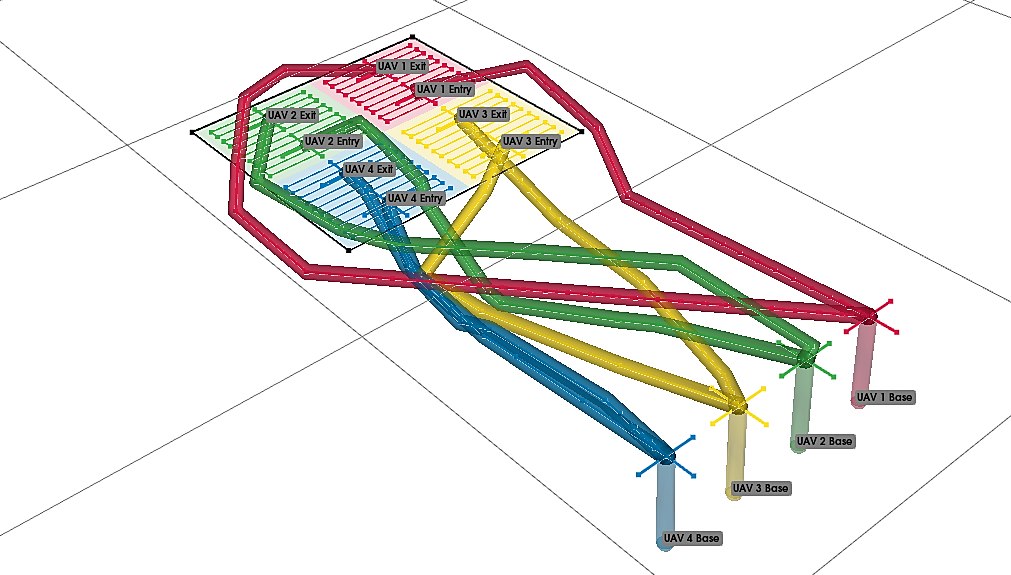
To ensure the safety of UAV group flights over agricultural areas, a method for planning capsule-shaped air corridors has been proposed. Each trajectory is represented as a three-dimensional volume of a fixed radius, covering possible deviations of the device due to navigation errors or wind disturbances. Route planning is carried out sequentially, taking into account already reserved corridors, and collision checking is implemented through analytical calculation of intersections between capsules and processing zones, supplemented by hierarchical filtering to increase computational efficiency. Numerical experiments on a 1 km2 site for groups of up to 32 vehicles confirmed the operability of the method, although they revealed a nonlinear increase in computational complexity with an increase in the number of agents, due to the increasing density of the airspace. Despite the disadvantages of the method, they do not reduce its practical value, since all trajectories are planned before the departure of the UAV and during the movement of the UAV they do not need to be rescheduled for safe flight.
In the field of human-machine interaction, an ergonomic one-handed remote control has been created that meets the requirements of intuitiveness and mobility. The novelty of the solution lies in the abandonment of traditional sticks in favor of a hybrid interface based on an IMU sensor, a contactless Hall sensor and a potentiometer, which reduces the cognitive and physical strain on the operator. The 210 g prototype provides up to 1.5 hours of battery life, a communication range of up to 10 km via the ExpressLRS protocol, and precise control through an anthropometrically based form. Additionally, a flight mode controller for the FPV UAV has been developed, integrating visual navigation into the control system with a minimum delay (0.42 ms), which allows for partial flight automation without compromising reactivity.
In addition, the design and creation of prototypes of four prototypes of agricultural UAVs with specialized attachments and a prototype prototype of equipment for the implementation of an intuitive human-machine interface have been implemented.
Field tests in 2025, conducted at the Novgorod experimental field of St. Petersburg FIT RAS in conditions of extreme waterlogging (269 mm of precipitation in June–July), confirmed the high effectiveness of the use of unmanned aerial vehicles (UAVs) at key stages of potato cultivation: monitoring the condition of crops, forming orthophotoplanes and carrying out spot pesticide treatments. The use of the QX22S4 and GD-4 UAV models made it possible to provide operational and highly detailed aeromonitoring with a ground resolution of up to 0.1 cm/pixel, as well as to perform uniform application of plant protection products with a consumption rate of only 50 l/ha versus 300 l/ha for ground processing.
In conditions where the use of ground-based equipment was difficult or impossible, the UAVs ensured the timely implementation of all phytosanitary measures, preventing soil compaction and mechanical damage to the tops. Visual and quantitative assessment showed the superiority of the experimental version: preservation of the green mass until the end of the growing season, localized damage by late blight and alternariasis, as well as an increase in yield by 14% (39.06 t/ha versus 33.91 t/ha in the control) with an increase in the yield of commercial tubers to 94.5%.
A number of companies in the agricultural sector have become qualified customers of the research, participating in the formation of scientific and technical specifications: A.N. Stepanov Farm, ORATAI Agricultural Sales and Supply Consumer Cooperative, etc.
The experiment confirmed that the effectiveness of UAV processing directly depends on the alignment of technical parameters with the agrobiological characteristics of the culture and the weather conditions of the region. The results obtained are consistent with international research and demonstrate that UAVs are not only a tool for accurate application of agricultural raw materials, but also a key element of the digital agroecosystem, providing integration of remote sensing data, vegetation index analysis and adaptive management of agrotechnological processes.
Despite the lack of legal regulation of pesticide treatments with UAVs in the Russian Federation, the data obtained confirm the economic and agronomic feasibility of their use, especially in the context of climate change and the growth of extreme weather events. The research results laid the foundation for further scaling of the technology and the development of adaptive systems with variable contribution rates integrated with big data analysis and machine learning platforms.
The results obtained: conceptual models, algorithms, hardware prototypes and experimental data form a reliable basis for the further development of adaptive, cognitive and self-organizing control systems for groups of UAVs capable of operating in real conditions of agricultural production.
Further research on this topic will be aimed at developing algorithms and software tools for seamless interaction within a group of UAVs in communication, movement and performance of target tasks (introduction of liquid substances and collection of plant data), prototyping intuitive human-machine interfaces based on scenarios for agricultural tasks and calculated parameters for the introduction of substances., as well as for the development of a prototype and testing of a group of agricultural UAVs with specialized ground-based equipment for autonomous agricultural tasks.aircraft in the absence of global navigation signals and interference.
The results obtained. In 2025, conceptual and structural-functional models were developed describing the functioning of a group of agricultural UAVs and an operator in open spaces of agricultural land. A description of scenarios for the implementation of targeted agricultural tasks by the operator using a group of UAVs has been created. The design and creation of prototypes of four prototypes of agricultural UAVs with specialized attachments for the introduction of liquid substances, aeromonitoring and the implementation of an intuitive human-machine interface between the operator and the UAV group was carried out.
The planned quantitative indicators of the scope of the work have been completed, including the publication of more than 12 articles in Russian and international journals indexed by Web of Science, Scopus, RSCI, RSCI.
The scope of application. UAVs in the field of agriculture, ecology, logistics.
The importance of the work. Improving the accuracy, productivity and environmental safety of agricultural work, as well as reducing the cognitive burden on the operator and accelerating the implementation of swarm robotics solutions in the agricultural sector.
Further scientific research on the topic will be continued within the framework of the Program of Fundamental Scientific Research in the Russian Federation for the long-term period (2021-2030).
In the course of completing the research tasks, conceptual and structural-functional models of intuitive human-machine interfaces and control of the seamless operation of a group of agricultural UAVs in open spaces were developed, taking into account the specifics of the target tasks of applying liquid substances and collecting data on plants during aeromonitoring.
One of the key barriers to the widespread introduction of groups of UAVs in agriculture is the lack of specialized ground infrastructure to ensure their autonomous maintenance, which can significantly increase the efficiency of a single operator. The task of servicing unmanned aerial vehicles on a robotic ground platform has been decomposed, taking into account the safety issues of landing the UAV and moving it inside the platform on an assembly line, using several types of autonomous positioning that ensure reliable navigation in the absence of GPS facilities. The layout of a ground-based automated service platform is proposed, characterized by the presence of a four-section conveyor line that compactly folds in transport condition, ensuring the removal of the seat to a safe distance and simultaneous maintenance of up to three UAVs, including battery replacement, refueling of the working fluid and transportation to the launch pad. The originality of the proposed model of an autonomous robotic maintenance platform for conveyor-type UAVs lies in a set of facilities that provide a platform for autonomous landing, a robotic device for replacing the battery and filling the liquid into the tank. These qualities make the proposed platform a promising basis for creating a fully autonomous operating cycle for a group of UAVs for agricultural needs.
Special attention is paid to the task of technical inspection: a method has been developed for determining the angle of inclination of supports based on images from UAVs, combining camera parameters, GNSS data and machine learning algorithms. High detection accuracy has been achieved (mAP50 = 0.71, F1-score = 0.88), and calculated tilt angles (from 0.6° to 24.5°) make it possible to objectively assess the state of the infrastructure, reducing dependence on the human factor for marking obstacles on the ground and reducing the time spent on preparing flight missions for the introduction of substances.
To ensure the safety of UAV group flights over agricultural areas, a method for planning capsule-shaped air corridors has been proposed. Each trajectory is represented as a three-dimensional volume of a fixed radius, covering possible deviations of the device due to navigation errors or wind disturbances. Route planning is carried out sequentially, taking into account already reserved corridors, and collision checking is implemented through analytical calculation of intersections between capsules and processing zones, supplemented by hierarchical filtering to increase computational efficiency. Numerical experiments on a 1 km2 site for groups of up to 32 vehicles confirmed the operability of the method, although they revealed a nonlinear increase in computational complexity with an increase in the number of agents, due to the increasing density of the airspace. Despite the disadvantages of the method, they do not reduce its practical value, since all trajectories are planned before the departure of the UAV and during the movement of the UAV they do not need to be rescheduled for safe flight.
In the field of human-machine interaction, an ergonomic one-handed remote control has been created that meets the requirements of intuitiveness and mobility. The novelty of the solution lies in the abandonment of traditional sticks in favor of a hybrid interface based on an IMU sensor, a contactless Hall sensor and a potentiometer, which reduces the cognitive and physical strain on the operator. The 210 g prototype provides up to 1.5 hours of battery life, a communication range of up to 10 km via the ExpressLRS protocol, and precise control through an anthropometrically based form. Additionally, a flight mode controller for the FPV UAV has been developed, integrating visual navigation into the control system with a minimum delay (0.42 ms), which allows for partial flight automation without compromising reactivity.
In addition, the design and creation of prototypes of four prototypes of agricultural UAVs with specialized attachments and a prototype prototype of equipment for the implementation of an intuitive human-machine interface have been implemented.
Field tests in 2025, conducted at the Novgorod experimental field of St. Petersburg FIT RAS in conditions of extreme waterlogging (269 mm of precipitation in June–July), confirmed the high effectiveness of the use of unmanned aerial vehicles (UAVs) at key stages of potato cultivation: monitoring the condition of crops, forming orthophotoplanes and carrying out spot pesticide treatments. The use of the QX22S4 and GD-4 UAV models made it possible to provide operational and highly detailed aeromonitoring with a ground resolution of up to 0.1 cm/pixel, as well as to perform uniform application of plant protection products with a consumption rate of only 50 l/ha versus 300 l/ha for ground processing.
In conditions where the use of ground-based equipment was difficult or impossible, the UAVs ensured the timely implementation of all phytosanitary measures, preventing soil compaction and mechanical damage to the tops. Visual and quantitative assessment showed the superiority of the experimental version: preservation of the green mass until the end of the growing season, localized damage by late blight and alternariasis, as well as an increase in yield by 14% (39.06 t/ha versus 33.91 t/ha in the control) with an increase in the yield of commercial tubers to 94.5%.
A number of companies in the agricultural sector have become qualified customers of the research, participating in the formation of scientific and technical specifications: A.N. Stepanov Farm, ORATAI Agricultural Sales and Supply Consumer Cooperative, etc.
The experiment confirmed that the effectiveness of UAV processing directly depends on the alignment of technical parameters with the agrobiological characteristics of the culture and the weather conditions of the region. The results obtained are consistent with international research and demonstrate that UAVs are not only a tool for accurate application of agricultural raw materials, but also a key element of the digital agroecosystem, providing integration of remote sensing data, vegetation index analysis and adaptive management of agrotechnological processes.
Despite the lack of legal regulation of pesticide treatments with UAVs in the Russian Federation, the data obtained confirm the economic and agronomic feasibility of their use, especially in the context of climate change and the growth of extreme weather events. The research results laid the foundation for further scaling of the technology and the development of adaptive systems with variable contribution rates integrated with big data analysis and machine learning platforms.
The results obtained: conceptual models, algorithms, hardware prototypes and experimental data form a reliable basis for the further development of adaptive, cognitive and self-organizing control systems for groups of UAVs capable of operating in real conditions of agricultural production.
Further research on this topic will be aimed at developing algorithms and software tools for seamless interaction within a group of UAVs in communication, movement and performance of target tasks (introduction of liquid substances and collection of plant data), prototyping intuitive human-machine interfaces based on scenarios for agricultural tasks and calculated parameters for the introduction of substances., as well as for the development of a prototype and testing of a group of agricultural UAVs with specialized ground-based equipment for autonomous agricultural tasks.aircraft in the absence of global navigation signals and interference.
The results obtained. In 2025, conceptual and structural-functional models were developed describing the functioning of a group of agricultural UAVs and an operator in open spaces of agricultural land. A description of scenarios for the implementation of targeted agricultural tasks by the operator using a group of UAVs has been created. The design and creation of prototypes of four prototypes of agricultural UAVs with specialized attachments for the introduction of liquid substances, aeromonitoring and the implementation of an intuitive human-machine interface between the operator and the UAV group was carried out.
The planned quantitative indicators of the scope of the work have been completed, including the publication of more than 12 articles in Russian and international journals indexed by Web of Science, Scopus, RSCI, RSCI.
The scope of application. UAVs in the field of agriculture, ecology, logistics.
The importance of the work. Improving the accuracy, productivity and environmental safety of agricultural work, as well as reducing the cognitive burden on the operator and accelerating the implementation of swarm robotics solutions in the agricultural sector.
Further scientific research on the topic will be continued within the framework of the Program of Fundamental Scientific Research in the Russian Federation for the long-term period (2021-2030).