// описание
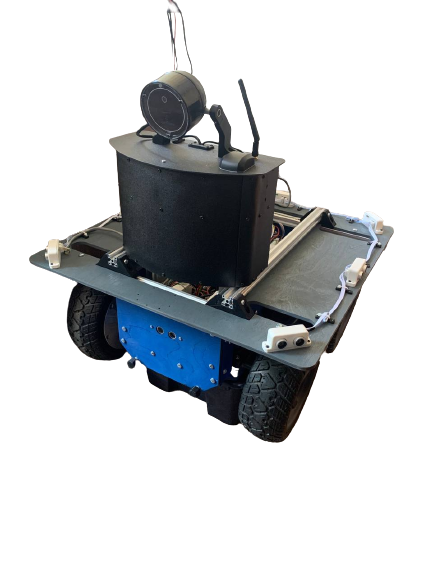
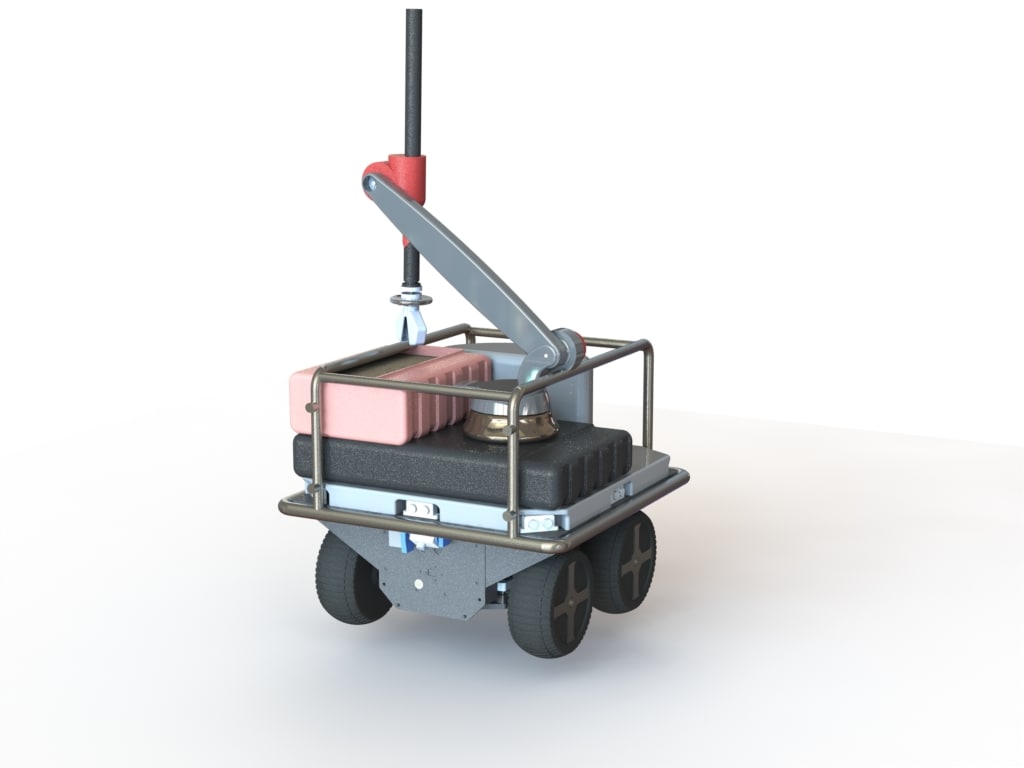
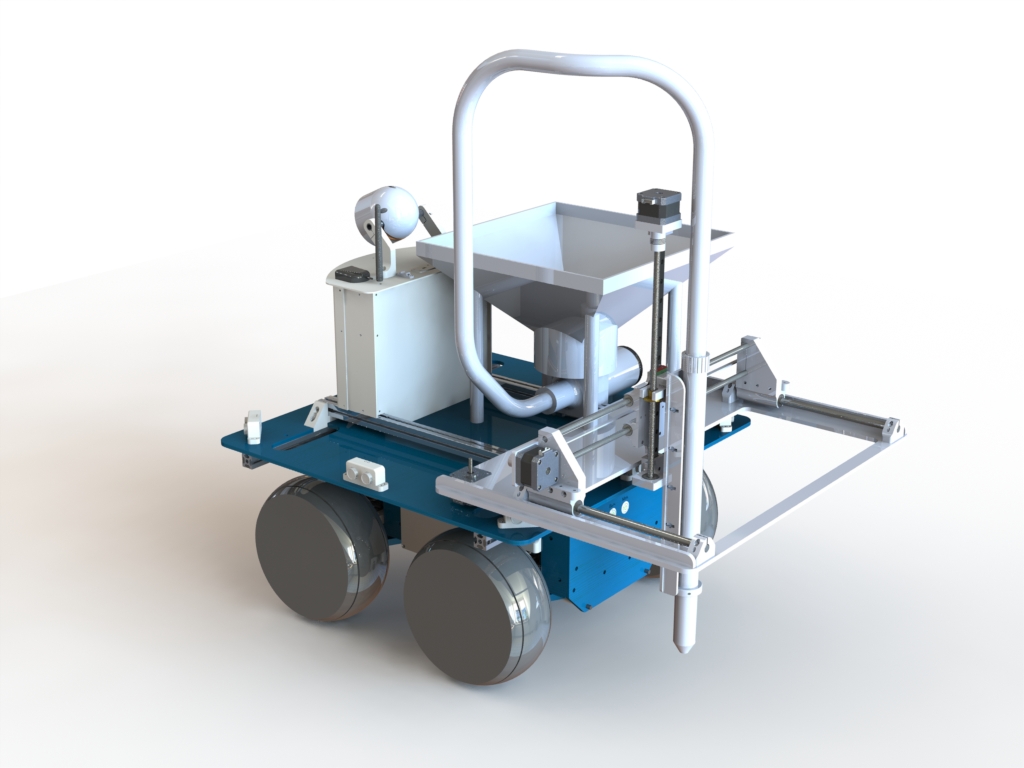
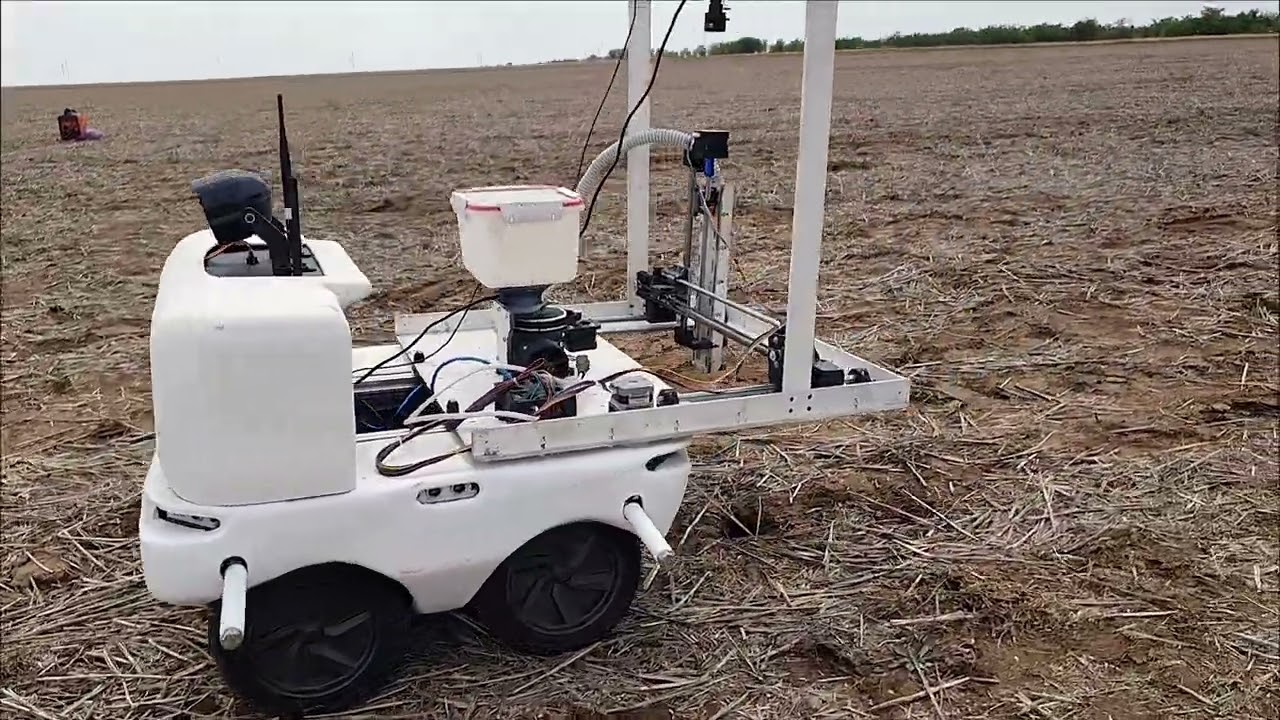
Робототехническая сельскохозяйственная платформа ориентирована на прикладную область применения и решает следующие задачи: • Предотвращение порчи урожая мелкими грызунами • Планирование траектории обследования на заданной области • Движение с учетом статических и динамических препятствий вдоль рассчитанной траектории Платформа выполнена по четырехколесной кинематической схеме с неповоротными колесами. Приводы платформы реализованы по схеме мотор-колесо. Каждое мотор-колесо имеет однорычажную подвеску и максимальную мощность 250 Вт. Для решения задач навигации и локализации платформа оборудована камерой глубины (альтернатива лидару) и семью ультразвуковыми дальномерами. В передней части платформы установлена перекладина для крепления обзорной камеры, камеры технического зрения и антенны GPS\ГЛОНАСС приемника. Энергоемкость аккумуляторной батареи составляет 325 Вт⋅ч, что позволяет осуществлять эксплуатацию платформы без дополнительного оборудования в течение 4 часов. Опционально емкость батареи может быть расширена, путем добавления навесного модуля, также оборудованного системой беспроводного заряда. Представленная платформа может дополнительно оснащаться оборудованием различного назначения, которое может устанавливаться в верхней части платформы с креплением к конструкционному профилю в необходимых местах. В качестве дополнительного оснащения могут выступать устройства, предназначенные для пробоотбора, манипулирования объектами, посадки БПЛА и перевозки грузов. Номинальная грузоподъемность данного образца мобильной платформы 20 кг. Базовая комплектация данного робота обеспечивает его автономное движение по заранее заданному маршруту, преодоление препятствий, передачу видеопотока с камеры, светодиодную матрицу для освещения окружающего пространства и световой индикации. Комплектация включает в себя: • Основной бортовой вычислитель (Raspberry Pi/ Intel NUC/ Nvidia Jetson); • Промежуточный контроллер для сбора и агрегации данных с периферийных устройств на основе микроконтроллера ESP32 (собственная разработка); • Семь ультразвуковых дальномеров со встроенным вычислителем. (параллельная обработка сигналов каждого датчика и отправка на промежуточный контроллер по CANbus, собственная разработка); • Камера глубины Intel Realsense Lidar Camera l515 (или лидар 3D); • Обзорная камера; • Драйверы для управления бесколлекторными тяговыми двигателями с датчиками холла (собственная разработка); • Аккумуляторную батарею Li-pol 4s; • Модуль распределения питания (управление питанием платформы, собственная разработка); • Модуль заряда аккумуляторной батареи (собственная разработка). Электротехническое оснащение платформы выполнено по принципу распределенной централизованной системы управления с двухуровневой архитектурой. Собственный вычислитель каждого модуля системы позволяет организовать вычисления в каждом исполнительном устройстве, сенсоре или подключаемом модуле, что значительно ускоряет работу системы, снижает вероятность ошибок и увеличивает надежность и отказоустойчивость. Разработанная архитектура системы управления обладает свойствами масштабируемости и универсальности, что позволяет создавать системы управления подвижными робототехническими комплексами различного назначения. Предложенные решения могут применяться для различных РТК, включая наземные, подводные и надводные. Перспективным направлением применения предложенных решений являются беспилотные летательные аппараты. Разработанная двухуровневая архитектура робототехнической платформы, включающая собственные вычислители для каждого модуля обладает рядом преимуществ: высокая скорость работы всей системы, надежность и помехоустойчивость. Предлагаемые научные и технические решения могут быть использованы не только на наземных мобильных платформах, но и на робототехнических средствах других типов.

// характеристики
| Мощность двигателей | 4 × 250 Вт |
| Основной бортовой вычислитель | Raspberry Pi/ Intel NUC/ Nvidia Jetson |
| Датчики препятствий | 7 ультразвуковых, со встроенным вычислителем (параллельная обработка сигналов каждого датчика и отправка на промежуточный контроллер по CANbus, собственная разработка) |
| Навигация | GPS / ГЛОНАСС |
| Аккумулятор | Li-pol 4s, 325 Вт·ч |
| Грузоподъёмность | 20 кг |
| Промежуточный контроллер для сбора и агрегации данных с периферийных устройств на основе микроконтроллера ESP32 (собственная разработка) | Intel Realsense Lidar Camera l515 (или лидар 3D) |
| Камера глубины | ✓ |
| Драйверы для управления бесколлекторными тяговыми двигателями с датчиками холла (собственная разработка) | ✓ |
| Модуль распределения питания | управление питанием платформы, собственная разработка |
| Модуль заряда аккумуляторной батареи | собственная разработка |
// медиа
// галерея